





El proyecto NEURON-DONES lleva a cabo una investigación que permita garantizar la optimización y mejora de procesos en IFMIF-DONES con el objetivo de poner a la disposición de la infraestructura, desde una fase prematura, las tendencias tecnológicas e industriales más punteras para su óptima implementación.
![]()
Para ello, NEURON-DONES se apoya en cuatro vectores fundamentales: la sostenibilidad de las soluciones; los aspectos más novedosos de la seguridad; Gestión Inteligente de la Operación mediante el uso de inteligencia artificial que permita una rápida evolución de los sistemas y el plan de operación, hasta alcanzar la operación estable; la Optimización del Flujo de Datos como elemento habilitador y orquestador de la inteligencia.
Desde Sener contribuimos a este proyecto en el desarrollo de tecnologías que permitan garantizar que los propios sistemas de seguridad de planta se encuentran siempre disponibles para hacer su función. Para ello la investigación se centra en:
Este proyecto nos dotará de los conocimientos y habilidades necesarios para capacitarnos en instrumentación y diagnóstico de cara a futuras instalaciones científico-tecnológico internacionales dentro del marco de energía renovable basada en fusión nuclear como Dones o Demo.
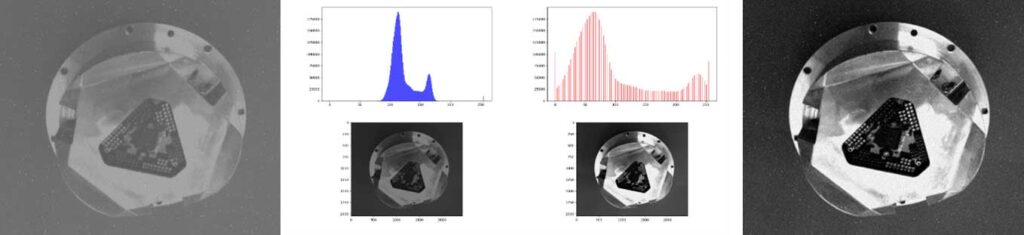
En el marco del desarrollo del proyecto Neuron-Dones, se ha completado con éxito la entrega correspondiente al Hito 3, marcando un avance significativo en la validación de tecnologías críticas orientadas a entornos de operación altamente exigentes. Durante esta fase, Sener ha concentrado sus esfuerzos en dos líneas tecnológicas clave: por un lado, el desarrollo de algoritmos de inteligencia artificial para la a estimación tridimensional precisa de la pose de objetivos, con base en la arquitectura del interfaz robótico SIROM; y por otro. La implementación de técnicas de detección y corrección visual para mitigar los efectos adversos de la radiación sobre las imágenes captadas por el sistema de visión embarcado.
Los algoritmos de estimación de pose han sido diseñados para operar sin necesidad de marcadores artificiales, utilizando únicamente características visuales del entorno, lo que permite un posicionamiento robusto y preciso incluso en configuraciones geométricas complejas. En paralelo, se han desarrollado modelos de aprendizaje profundo capaces de identificar degradaciones visuales típicas de sensores expuestos a radiación ionizante- como ruido gausiano, pixeles muertos y perdida de contraste entre otros- y aplicar técnicas de reconstrucción para preservar la integridad informativa de las imágenes procesadas.
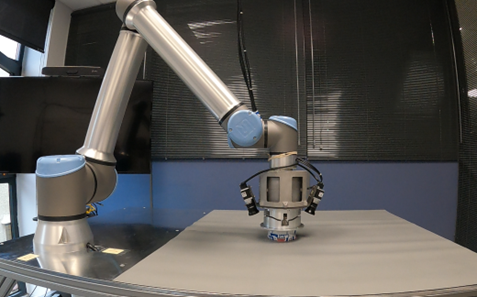
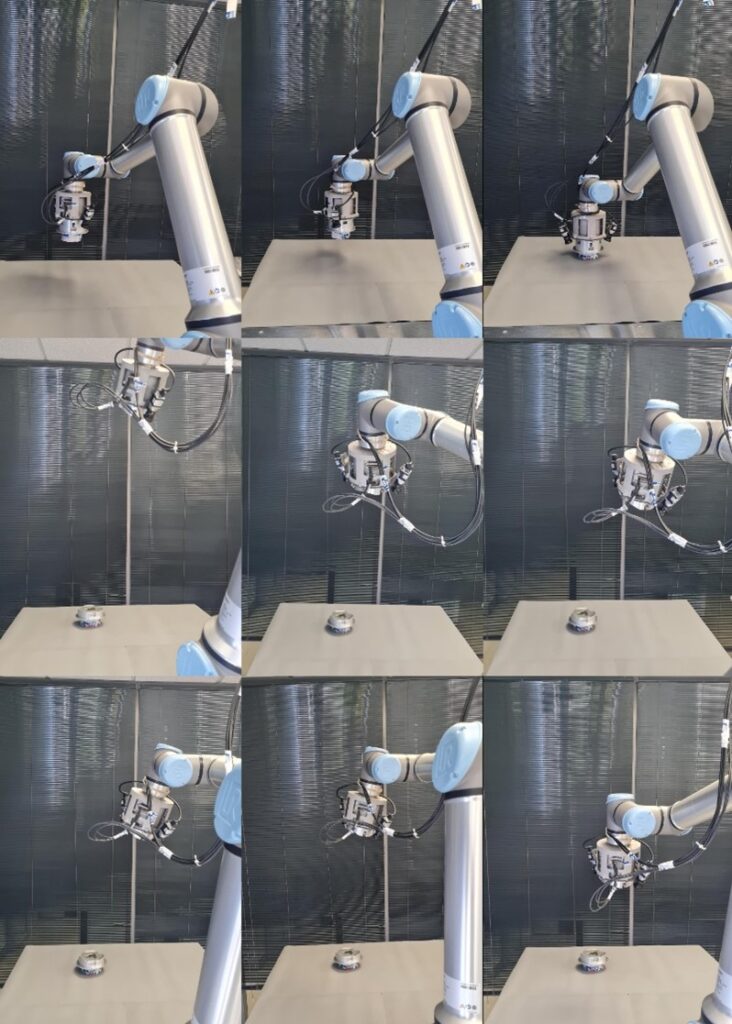
Ambas tecnologías están siendo actualmente integradas y validados sobre un demostrador robótico en un entorno de pruebas controlado, donde se simulan condiciones operativas representativas. Esta plataforma experimental permite evaluar la interacción real entre los sistemas de percepción y control, y verificar la estabilidad y fiabilidad del comportamiento del sistema en tareas autónomas de localización y acoplamiento.
Los resultados obtenidos hasta el momento son técnicamente prometedores y permiten anticipar una evolución favorable hacia la validación completa del sistema, reforzando su aplicabilidad en escenarios científicos e industriales donde la autonomía, la precisión y la resiliencia frente a condiciones extremas son requisitos fundamentales
Este proyecto, con número de expediente MIG-20221067, ha sido subvencionado por el CDTI – Centro de Desarrollo Tecnológico y la Innovación – a través de la convocatoria del Programa ‘Misiones CDTI‘ del año 2022 y por la Unión Europea – NextGenerationEU – Mecanismo de recuperación, transformación y resiliencia.
![]()
![]()
![]()
![]()

